1.
Introducción
La cacería furtiva es uno de
los principales factores de la extinción de especies y la pérdida de
biodiversidad a nivel mundial. En la provincia de Misiones (Argentina), este
flagelo afecta a diversas especies naturales declaradas Monumentos Naturales de
Fauna por la provincia [1] y en peligro de extinción como el Águila
Harpía (Harpia harpyja), el Yaguareté (Phantera onca) y la Yacutinga
(Pipile jacutinga). Además, otras especies que hacen al equilibro de la
biodiversidad selvática de la provincia, como ser los pecaríes, corzuelas,
especies de aves comestibles, se encuentran en algún grado de amenaza debido
principalmente a la cacería furtiva en reservas naturales, tanto públicas como
privadas.
La provincia de Misiones integra
la región fitogeográfica Paranaense, o también conocida como “Selva Misionera”,
y se caracteriza por estar cubierta de distintos tipos de selvas con alguna
presencia de campos abiertos y esteros [2]. De los aproximadamente 3 millones de
hectáreas que ocupa la provincia de Misiones, prácticamente un tercio de ellas;
es decir, 1 millón de hectáreas están protegidas por ley y albergan selvas de
diferentes características y niveles de conservación [2]–[4], encontrándose prohibida la
cacería. Sin embargo, la densidad y grandes extensiones de selva existentes
hacen que el control y la fiscalización de los delitos ambientales sea una
tarea en extremo compleja principalmente debido a tres motivos: la imposibilidad
de contar con presencia de fuerzas de seguridad en todos los sectores críticos
de las áreas naturales protegidas, la facilidad con la que los cazadores pueden
esconderse en la selva y los escasos recursos humanos y técnicos para hacer
frente a este tipo de infracciones ambientales.
En el presente trabajo se
propone un sistema de detección automática de caza furtiva que permite
disminuir el efecto de estos tres motivos que complejizan las tareas de control
de las fuerzas encargadas de resguardar la biodiversidad de la selva Misionera [5]. Este sistema se fundamenta en
diversas propuestas existentes en la bibliografía [6]–[8], pero con diferentes focos
de aplicación, y en investigaciones y trabajos previos de los autores [9]–[11] en donde se han propuesto
algoritmos detección de disparos de arma de fuego, grabadores de audio
autónomos para ambientes selváticos [12] y trabajos acerca de la complejidad
que involucran las comunicaciones de datos por radiofrecuencia en ambientes
selváticos [13], [14]. La novedad de la
metodología de detección del sistema propuesto radica en el concepto de nodos
elementales; los cuales, de manera equivalente a una red neuronal, distribuyen
la capacidad de cómputo del sistema en pequeños nodos con capacidades
computacionales y energéticas mínimas, pero que en su conjunto, y mediante un
protocolo especial de comunicación, permiten eficiencias de detecciones más altas
y robustas que otros sistemas propuestos en la literatura [6]–[8], [15].
2.
Sobre la detección de un
disparo de arma de fuego en ambiente natural
La detección del sonido proveniente
de la detonación de un arma de fuego en ambientes naturales no es tarea
sencilla de encarar mediante sistemas automáticos. Esto se debe principalmente
a que este tipo de sonidos puede tener equivalentes muy similares, pero de
origen natural, y su identificación precisa y con eficiencias elevadas que
generen estadísticas o datos confiables para fundamentar tareas de control por
fuerzas especiales, requiere de los siguientes cuidados:
2.1.
Indicios de caza furtiva
en selva
Los ambientes naturales de la
provincia de Misiones son casi en su totalidad selváticos [2], más específicamente selva
atlántica, un tipo de selva subtropical con densidad vegetal variable, pero en
todos los casos densa y con altos porcentajes de humedad. La detección de caza
furtiva en este tipo de ambiente es una tarea muy compleja debido a la espesura
y tamaño de los ambientes selváticos en donde se ejecutan los delitos, los cuales
pueden abarcar en algunos casos cientos de miles de hectáreas [2], [3].
Existen diversas formas de
advertir la presencia de cazadores en estos lugares, por ejemplo, a través de
trabajos de observación directa de presencia humana en campo, como ser senderos,
campamentos, vehículos sospechosos, etc.; o bien, mediante la audición de los
eventos vinculados a la cacería. Dentro de las técnicas de detección por
sonidos, el método más interesante y evidente es el de disparos de arma de
fuego. Las señales acústicas son de importancia en la detección de acciones
vinculadas a la caza furtiva, existiendo ingeniosas estrategias de detección de
disparos [16], pero también pueden ser captados otros
sonidos relacionados, incluso la detección de pasos asociados a humanos [17].
La detección de disparos
resulta eficiente debido a que permite detectar de manera segura, a la
distancia y en el momento, a la actividad furtiva en el área. El inconveniente
de esta metodología es que se requiere de la presencia permanente de personal
atento a los sonidos, y una vez detectado el mismo, no es sencillo determinar
la ubicación exacta de los cazadores y actuar con la suficiente prontitud.
2.2.
Detección automática de
disparos en áreas selváticas
Durante los últimos años, los
autores han trabajado y publicado avances en sistemas de detección autónomos de
disparos de arma de fuego aplicables a la detección de cacería furtiva en
selvas. Estos aportes comenzaron con el estudio de la acústica de un disparo,
el desarrollo de equipos de grabación de audio para ambientes abiertos [12], la prueba de enlaces de
comunicación en selvas [14], [18] y el desarrollo de
algoritmos de detección de disparos en grabaciones que fueron capaces de
detectar disparos de armas de fuego de distintos calibres de manera muy
eficiente, evitando falsas detecciones por sonidos similares, como el canto de
algunas aves [9].
Estas técnicas de detección
de disparos en audios, como así también otras propuestas de diversos autores [19] [20] permitirían detectar eventos
sonoros provenientes de armas de fuego a la distancia con una gran eficiencia.
Sin embargo, la aplicación práctica presenta un inconveniente que generalmente
no es considerado. Existen sonidos que son en extremo similares a disparos de
armas de fuego, pero que provienen de fuentes naturales como ser la rotura de
ramas (principalmente cañas o tacuaras), la caída de árboles o el estruendo de
truenos. Aunque estos sonidos pueden ser similares, su potencia y distancia de
propagación pueden ser considerablemente distintas a las de un disparo de arma.
Así, un sistema de detección basado en un procesamiento local y concentrado de
las señales sonoras ambientales, probablemente arrojará falsos positivos ante
los fenómenos naturales indicados. Por ello, en el presente trabajo se propone una
estrategia de detección de disparos basada en la distribución de la
inteligencia de la detección en diversos nodos elementales, que permiten
sortear estos sonidos similares a disparos y en conjunto con un buen plan de
ubicación de estos nodos en el terreno y un protocolo de comunicación entre
nodos, viabilizar la detección de caza furtiva con gran eficiencia.
3.
Sistema de Detección por
Nodos Elementales
El concepto de detección por
nodos elementales radica en distribuir las etapas de procesamiento de señales de
un único detector, que en general requiere de gran capacidad de cómputo y
energía, en diversos nodos mucho más simples y con capacidad de computo
elemental que, en su conjunto, y sostenidos por un protocolo de comunicación
bidireccional, permiten lograr altos índices de eficiencia en detecciones. Estrategias
similares se vienen utilizando en aplicaciones como el monitoreo de incendios [21].
En la aplicación considerada
en este trabajo, la inteligencia colectiva o distribuida posee la ventaja adicional
de evitar falsas detecciones por sonidos muy similares a disparos, pero de
menor potencia, como la rotura de ramas o de mayor potencia, como los truenos.
Otra ventaja de un sistema basado en nodos elementales es que la correcta
instalación de cada nodo permitiría identificar el punto geográfico de
proveniencia de la detección, haciendo más eficiente el trabajo de las fuerzas de
seguridad que deban acudir a revisar la zona.
En relación a la composición
de los nodos, cada uno de ellos posee en su interior un procesador digital de
bajas prestaciones y mínimo consumo de energía, un sistema de alimentación
energético eficiente, un micrófono y un módulo de comunicaciones inalámbrico
por radiofrecuencia capaz de lograr enlaces a un máximo de 2 Km. en áreas
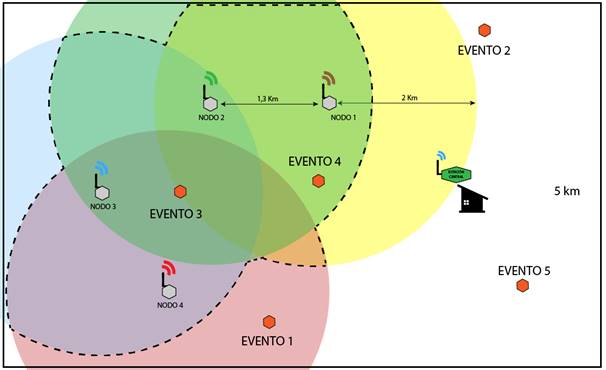
naturales. El sistema propuesto se puede ver en el esquema de la Figura 1.
Fig. 1. Esquema de
sistema de detección por nodos elementales. 5 nodos y una estación central.
Para este esquema se observan
5 nodos colocados en campo y alrededor de cada uno de ellos un círculo
concéntrico que representa el radio de detección de disparos del nodo
involucrado. Este radio varía en función de la topografía y densidad vegetal
del lugar, y fundamentalmente del calibre del arma a detectar. En el caso más
complejo, donde la topografía sea sinuosa y el calibre de arma chico (por
ejemplo un arma calibre 22), el radio de detección será de no más de 500
metros, mientras que para calibres grandes y topografía plana, este radio puede
extenderse hasta los 4 kilómetros.
Cada nodo se encuentra
separado uno de otro a una distancia no mayor a los 1,5 kilómetros, y esto se
define principalmente para asegurar el enlace de comunicación entre nodos
próximos. En función a la disposición de los nodos y como se puede ver en la
Fig. 1, existen nodos que podrán estar en contacto con más de un nodo vecino a
la vez, mientras que otros solo estarán en comunicación con solo un nodo adyacente.
Esto permite extender el área de vigilancia a superficies mucho mayores que las
posibles con un único nodo, por ejemplo y como se puede analizar en la Fig. 1,
la distancia entre la estación central y el Nodo “5” es de aproximadamente 5
kilómetros.
La estación central es la
encargada de recibir las detecciones validadas por el algoritmo de inteligencia
colectiva de los nodos elementales y procesarla. Esta estación, que idealmente
se encuentra en un puesto de control o algún lugar con energía eléctrica, al no
sufrir las limitaciones energéticas de los nodos en campo, podrá tener la
posibilidad de mostrar en una pantalla los datos registrados, las fechas de las
detecciones, con sus respectivos horarios y almacenar toda la información en un
archivo de texto de fácil acceso. Además, en caso de estar en un área con
conectividad (Internet o GPRS), podrá enviar reportes en tiempo real a quien
los requiera.
3.1.
Inteligencia colectiva o
distribuida de los nodos
El concepto de distribuir la
capacidad de detección de un solo nodo de grandes prestaciones computacionales en
diversos nodos elementales básicos posee dos principales ventajas. La primera
radica en la eficiencia energética. Estos nodos deben funcionar en ambientes
donde no existe energía de red eléctrica y por lo tanto su consumo debe ser
mínimo. En el caso de los nodos elementales, su pequeño procesador realiza
tareas básicas y el consumo energético del sistema completo puede reducirse
significativamente, a diferencia de otros equipos que deban realizar tareas de
procesamiento avanzadas y en tiempo real, que requieran de mayores necesidades
energéticas.
Otra ventaja radica en la
capacidad de sensar mayores distancias y corroborar las detecciones entre nodos
adyacentes utilizando un protocolo de comunicación bidireccional, que
analizaremos más adelante y que valida las detecciones individuales aumentando
la eficiencia del sistema significativamente.
En cuanto a la tecnología de
comunicación propuesta, ensayos previamente realizados por los autores sugieren
las ventajas de utilizar módulos comerciales de la marca LoRa [18]. Estos productos también han mostrado
sus virtudes en otras aplicaciones relacionadas con el internet de las cosas [22] [6]. Se propone transmitir, además de la
información de detección, la estampa de tiempo de arribo, que es de utilidad en
la delimitación precisa de áreas de origen del disparo, ya que estudios
publicados en la literatura para la realización de la conformación de haces (beamforming)
distribuida así lo demuestran [23][24]. En este sentido, otro parámetro
relevante para mejorar la precisión en la detección son los niveles de potencia
de las señales detectadas.
4.
Algoritmo o protocolo de
validación conjunta
El
protocolo de validación conjunta es el corazón del funcionamiento del sistema
distribuido de detección. Permite al sistema detectar eventos de caza furtiva en
superficies grandes y con gran precisión, como así también, enviar el reporte
de dicha detección convalidada por un mínimo de dos nodos a la estación central
que puede encontrarse a kilómetros del punto de detección. La distribución
geográfica de cada nodo deberá estar en concordancia con la topografía del
lugar, pero se debe cumplir obligatoriamente que la distancia lineal entre dos
nodos vecinos no sea mayor a 1.5 kilómetros y no menor a 1 kilómetro (ver
Figura 2), y en caso de densidades vegetales extremas o áreas muy serranas, se
debe verificar que el enlace de comunicación entre dichos nodos exista y sea
confiable.
La
distancia de 1.5 kilómetros entre nodos no es únicamente para cuestiones de
comunicación, sino que es funcional a la lógica de detección del sistema
completo. El principio de funcionamiento del sistema se basa en que un disparo
de arma de fuego deba ser detectado por un mínimo de 2 nodos. En base a esto, y
según los estudios de campo previos realizados, se determinó que separando cada
nodo por distancias comprendidas entre 1 y 1.5 kilómetros, se obtienen los
mejores resultados. La distancia mínima de 1 km evita que dos nodos vecinos
confirmen detecciones en base a sonidos similares a disparos pero de menor
potencia, como cantos de algunas aves (genero Cryptorellus), roturas de
ramas o sonidos similares. La distancia máxima de 1.5 kilómetros posibilita que
un arma de calibre chico pueda ser detectada simultáneamente por 2 nodos
vecinos, manteniendo la distancias en rangos factibles de comunicación. Como se
mostró en la Fig. 1, cada nodo puede estar en comunicación con 1 o más vecinos.
Respetando estas reglas, el sistema podrá funcionar adecuadamente.
Funcionamiento:
Este
protocolo fue pensado para uso específico de este sistema. Para que funcione,
cada nodo debe tener asociado un número y una constante de tiempo específica igual
a la inversa de su número. Por ejemplo, el nodo 3 tendrá una constante de
tiempo “c=1/3”.
Analicemos
la Figura 2, la cual utiliza una disposición genérica de 4 nodos, a los que se
agrega una estación central en un predio de 4000 hectáreas. En esta figura se
esquematiza cada nodo con una superficie de detección teórica de 2 kilómetros
de radio, estando cada nodo separado linealmente entre sí por la distancia
pactada de 1 a 1.5 kilómetros. Además, se han indicado con rombos rojos a 5
puntos en donde se simula un disparo de arma de fuego para evaluar el
funcionamiento del sistema ante ellos.
Fig. 2. Esquema teórico de área de detección y disposición de nodos en predio
de 4000 hectáreas.
La
superficie de detección está indicada por la línea a trazos negra, es decir,
todo disparo dentro de esa superficie podrá ser teóricamente detectado por un
mínimo de 2 nodos. Esta superficie de cobertura, de aproximadamente 1500 hectáreas,
puede ser optimizada moviendo la posición de los nodos. Como se indicó, cada
nodo posee un número y una constante de tiempo “C”, esto se resume en la
siguiente tabla:
|
Nodo
|
C
|
Radio de detección
|
|
Nodo 1
|
1
segundo
|
2 Km
|
|
Nodo 2
|
1/2
segundo
|
2 Km
|
|
Nodo 3
|
1/3
segundo
|
2 Km
|
|
Nodo 4
|
1/4
segundo
|
2 Km
|
Tabla 1:
Constantes de tiempo y radio de detección de cada nodo
Para el
funcionamiento del algoritmo de detección y validación se utilizan dos tipos de
mensajes. El primero se genera al detectar un disparo por un solo nodo y se
denomina “aviso de detección simple” y se lo resumirá como “AV1”. El
segundo mensaje es cuando dos o más nodos han detectado un disparo, por lo
tanto son detecciones confirmadas. Estos avisos se denominan “aviso de
detección múltiple x” AVMx donde “x” indica la cantidad de nodos que han
efectuado la detección. Su simplificación será, por ejemplo: AVM3 = detección
múltiple por 3 nodos. En base a esto, el protocolo funciona de la siguiente
manera:
1) Al ocurrir
una detección por un nodo cualquiera, éste espera un tiempo igual a su constante
de tiempo, luego de la cual, emite un AV1 que será escuchado por los nodos
vecinos. En este momento pueden producirse dos situaciones:
a. Si hay un
nodo vecino de mayor “C” que también haya escuchado el disparo, éste estará en
modo de espera (por su mayor C) y al recibir el AV1, confirmará la detección y
procederá con la etapa de confirmación y envío de un AVM2. Este aviso indica
que se ha confirmado por 2 nodos un disparo y es un evento que debe ser
informado a la central. En caso de que el nodo no haya detectado un evento, se descarta
el AV1 recibido.
b. Si hay un
nodo con un menor “C” alrededor que haya escuchado el disparo, éste, al tener
un menor C, habrá enviado previamente su AV1. Al recibir el AV1, lo descarta. Si
este nodo no detectó un disparo, descarta el AV1.
2) Cuando un
nodo cualquiera confirma una detección (es decir, recibe un AV1 y también
escucho un disparo) envía un AVM2. Este AVM2 se envía luego de transcurrido un
tiempo igual al mayor C de todos los nodos (generalmente 1 segundo). Este
tiempo de “confirmación” permite recibir otros AV1 de otros nodos que hayan
detectado el evento. Una vez que se termina el tiempo de confirmación, el nodo
envía un AVMx y queda en estado de reposo (sin recibir ni emitir nada) un
tiempo igual a 3C.
3) Cuando un
nodo cualquiera recibe un AVMx lo reenvía a todos los nodos circundantes luego de
esperar un tiempo igual a su constante C. De esta forma, el AVMx terminará
llegando a la estación central en donde se almacena o reporta al usuario.
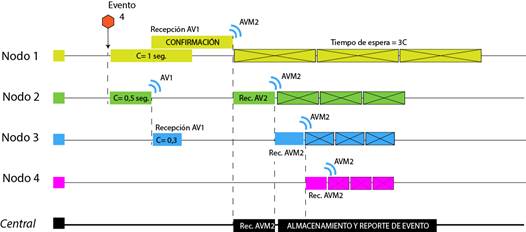
Este
proceso se puede ejemplificar para los eventos graficados en la Figura 2. En el
caso del Evento 4, este es oído por los nodos 1 y 2, y el proceso de validación
se muestra en el siguiente gráfico temporal. Observar que cada rectángulo tiene
una duración igual a la constante de tiempo C del nodo involucrado.
Fig. 3. Simulación de protocolo para el Evento 4
Al ocurrir
el Evento 4, éste, según su punto geográfico de origen y la distribución de los
nodos de la Figura 2, será oído y detectado por los Nodos 1 y 2, y por ningún
otro nodo. Al detectar el evento, ambos nodos esperan su constante de tiempo C
para luego emitir el AV1. El Nodo 2 emite primero por su menor C. Este AV1 es
recibido por el Nodo 1 (que estaba en espera) y el Nodo 3. El Nodo 3 al no
haber detectado ningún disparo, descarta el AV1. El Nodo 1 recibe el AV1 y de
esta forma confirma el evento, ya que fue oído por él mismo y un nodo vecino.
El aviso de detección doble AVM2 se envía luego de transcurrido el tiempo de
confirmación (1 segundo), y luego de esto, dicho nodo entra en espera por un
tiempo igual a 3C.
El AVM2
emitido por el Nodo 1 es recibido por el Nodo 2 que, luego de su constante C,
reenvía el AVM2 y entra en espera. Así, los AVM2 son recibidos y enviados por
todos los nodos hasta que por algún camino se establece la comunicación con la
estación central que almacena o reporta el evento. En este caso, la central
recibe el AVM2 directamente desde el Nodo 1 pues está en su radio de alcance.
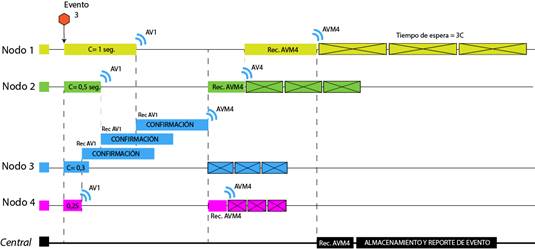
Un caso
más complejo puede ocurrir al producirse el Evento 3, el cual será detectado
simultáneamente por los 4 nodos. Este sería un caso más bien teórico, ya que
una correcta distribución de los nodos debería distribuir las superficies de
detección evitando solapamiento entre 4 nodos, pero sirve para ejemplificar el
funcionamiento del protocolo. En este caso, la detección, verificación y
reporte se desarrolla de la siguiente forma:
Fig. 4. Simulación de protocolo para el Evento 3. 4 detecciones simultáneas.
En este
caso, el Evento 3 es detectado simultáneamente por los nodos 1, 2, 3 y 4, por
lo que los cuatro emiten el correspondiente AV1, pero lo hacen a tiempos
diferentes, determinados por su constante C. El primero en emitir efectivamente
el AV1 será el nodo de menor C, es decir el Nodo 4. Este AV1 es recibido por el
Nodo 3 únicamente (por su cercanía) y por lo tanto, entra en etapa de
confirmación pues dicho nodo también detectó el Evento. Este proceso de
confirmación se prolonga por 1 segundo (el C mayor del arreglo de nodos) y
durante el transcurso del mismo el Nodo 3 recibe el AV1 del Nodo 2, reseteando
la etapa de confirmación. Esto ocurre de igual manera un instante después
cuando se recibe el AV1 proveniente del Nodo 1. Luego de esto, la confirmación
no es interrumpida por ningún otro AV1 y de esta forma se emite un AVM4, es
decir, un aviso de detección múltiple por 4 nodos. Este AVM4 es recibido por
los nodos más cercanos al 3, es decir, el Nodo 4 y 2. Ambos nodos repiten el
AVM4 y entran en espera. El AVM4 repetido por el Nodo 2 es recibido y repetido
por el Nodo 1, el cual finalmente hace llegar el AVM4 a la central, la cual
almacenará el reporte de detección de los 4 nodos.
A modo de
ejemplo se han ilustrado situaciones en donde no es posible detectar los
eventos. Estos son los Eventos 1, 5 y 2 de la Figura 2. Los eventos 2 y 5 no
son detectables pues ocurren en puntos que no son audibles por ningún nodo, y
el caso del Evento 1 es solamente detectado por el Nodo 4, y no puede ser
confirmado por ningún otro nodo (no se genera el AVM2).
El
protocolo de comunicación bidireccional de nodos independientes permite también
la configuración remota de los nodos con su respectiva confirmación de
configuración realizada con éxito. Esta opción permitiría reprogramar desde la
central (accesible fácilmente) con diferentes capacidades específicas a los
nodos para tareas especiales, lo cual es mucho más sencillo que retirar,
reprogramar y volver a colocar en el campo los nodos. El proceso de
configuración “en el aire” se esquematiza en la Figura 5, y funciona de la
siguiente manera.
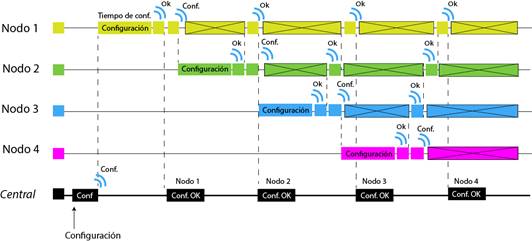
Fig. 5. Programación “en el aire” de nodos en campo
Cuando
se desea realizar la reconfiguración de los nodos, el nuevo programa debe ser cargado
en la central, desde la cual se reenvía a la red de nodos. Este mensaje de
configuración es recibido por el nodo más próximo, en este caso el Nodo 1, que
procede a reconfigurarse y finalizado este proceso, envía un paquete de
“Configuración realizada con éxito” (Ok) que es recibido por la central, la
cual está a espera de estos paquetes específicos. Luego del envío del “Ok” del
Nodo 1, este reenvía el paquete de reconfiguración, el cual es recibido por el
nodo más próximo, en este caso el Nodo 2. El Nodo 1, luego de enviado el
paquete de reconfiguración queda en un modo de espera de “Ok” de los nodos cercanos.
El
Nodo 2 se reconfigura y envía el “Ok”, el cual estaba siendo esperado por el
Nodo 1, el cual lo reenvía a la central. Este proceso de repite hasta que el
último nodo (Nodo 4) ya no tiene a quién enviar el paquete de reconfiguración,
y la estación central recibe los “Ok” de todos los nodos de la red.
5.
Conclusiones
En este trabajo se propone
una alternativa novedosa que permite monitorear y alertar de manera instantánea
áreas naturales extensas frente a uno de los delitos ambientales más problemáticos
a nivel mundial, la caza furtiva. Se mostró que utilizando una red de nodos con
un micrófono y un procesador de bajos recursos computacionales y energéticos se
puede detectar la caza furtiva mediante el procesamiento básico de la señal de
audio de cada nodo. Estas detecciones se apoyan en un protocolo de comunicación
bidireccional entre todos los nodos que aumentan significativamente la
eficiencia y confianza de las detecciones. La distribución de la inteligencia
del sistema en diversos nodos elementales evita falsas detecciones por roturas
de ramas, cantos de aves o eventos atmosféricos que serían prácticamente
imposibles de diferenciar por sistemas que solamente utilicen un detector
independiente de altas prestaciones computacionales.
Agradecimientos
Este trabajo es posible
gracias a los aportes provenientes del Proyecto de Desarrollo Tecnológico y
Social (PDTS) titulado “Red de Sensores Autónomos para Monitoreo Medioambiental
y de Actividad Ilegal en Parques Nacionales, Provinciales y Reservas Naturales”
bajo el código 16/I166 – PDTS. Se agradece al departamento de Electrónica y al
Grupo de Investigación y Desarrollo en Ingeniería Electrónica (GIDE).
Referencias
[1] Gobierno de la Provincia de Misiones,
Ministerio de Ecología y RNR, «Monumentos Naturales», 2012.
http://www.ecologia.misiones.gov.ar/ecoweb/index.php/anp-descgen/clasificacion/monumentos-naturales
[2] Guillermo
Gil, Areas Claves para la Biodiversidad de la Provincia de Misiones.
Aves Argentinas, 2022.
[3] Gobierno
de la Provincia de Misiones; Ministerio de Ecología., «Sistemas de Areas
Naturales Protegidas (SANP)», 2017.
http://www.ecologia.misiones.gov.ar/ecoweb/index.php/anp-descgen/sistema-de-areas-naturales-protegidas
[4] Planificación
de las Áreas Protegidas del Núcleo Norte de la Provincia de Misiones, «Plan de
manejo del Parque Provincial Puerto Península», 2010.
http://www.losquesevan.com/plan-de-manejo-del-parque-provincial-puerto-peninsula.1517c
[5] Sergio
Moya, «Una red de sensores para proteger la selva misionera», Argentina
Investiga - Divulgación Científica y Noticias Universitarias, 1 de octubre
de 2018. [En línea]. Disponible en: http://argentinainvestiga.edu.ar/noticia.php?titulo=una_red_de_sensores_para_proteger_la_selva_misionera&id=3328
[6] E. D.
Ayele, «Hunting the hunters: Wildlife Monitoring System», abr. 2020, doi:
10.3990/1.9789036550031.
[7] J.
Montero-Aragón, C. Salazar-García, R. Castro-Gonzalez, J. Cárdenas-Reyes, A.
Chacon-Rodríguez, y P. Alvarado-Moya, «An embedded system for the detection of
illegal hunting and logging», en 2016 IEEE 36th Central American and Panama
Convention (CONCAPAN XXXVI), nov. 2016, pp. 1-5. doi:
10.1109/CONCAPAN.2016.7942350.
[8] A.
Conteh, M. C. Gavin, y J. Solomon, «Quantifying illegal hunting: A novel
application of the quantitative randomised response technique», Biological
Conservation, vol. 189, pp. 16-23, sep. 2015, doi:
10.1016/j.biocon.2015.02.002.
[9] Sergio
Moya, Javier Kolodziej, y Julia Martinez Pardo, «Algoritmo de Detección
Off-line de Disparos de Arma de Fuego en Audio», ARGENCON 2018, jun.
2018.
[10] Sergio
Moya, Javier Kolodziej, Julia Martinez Pardo, y Juan Pablo Gross, «Algoritmo de
Detección Off-line de Disparos de Arma de Fuego en Audio», presentado en
ARGENCON 2018, Tucumán - Argentina, 2018.
[11] De
Almeida, Gonzalo, Kelm, Marcelo, Moya Sergio, y Korpys Ricardo, «Detección de
Disparos de Armas de Fuego en Ambientes Selváticos», 9o Encuentro
Grupo Latinoamericano de Emisión Acústica - GLEA, 2017.
[12] Carlos
Bajura, Gustavo Bazante, Sergio Moya, y Ricardo Korpys, «Equipo de Grabación de
Audio Autónomo para Estudios Biológicos en Ambientes Selváticos», Jornadas
de Investigación Desarrollo Tecnológico Extensión y Vinculación 2018,
Agosto de 2018.
[13] Gonzalo
Oscar Frías, José Szychowski y Sergio Moya, «Módulos Transceptores de
Radiofrecuencia para pruebas de Comunicación en Ambiente Selvático», Jornadas
de Investigación, Desarrollo Tecnológico, Extensión, Vinculación y Muestra de
la Producción - JIDeTEV 2019, sep. 2019.
[14] José
Szychowski; Gonzalo Oscar Frías, «Módulos Transceptores de Radiofrecuencia para
pruebas de Comunicación en Ambiente Selvático», Universidad Nacional de
Misiones - Facultad de Ingeniería, 2019.
[15] Y.
Arslan y B. Güldoğan, «Impulsive sound detection and gunshot recognition»,
en 2015 23nd Signal Processing and Communications Applications Conference
(SIU), may 2015, pp. 511-514. doi: 10.1109/SIU.2015.7129872.
[16] J.
Kamminga, E. Ayele, N. Meratnia, y P. Havinga, «Poaching Detection
Technologies—A Survey», Sensors, vol. 18, n.o 5, Art. n.o
5, may 2018, doi: 10.3390/s18051474.
[17] M.
V. Fulzele, M. Y. Kulkarni, y M. S. Aras, «Conservation of Wildlife from
Poaching by using Sound Detection and Machine Learning», International
Journal of Engineering Research & Technology, vol. 8, n.o 5,
mar. 2020, Accedido: 7 de abril de 2022. [En línea]. Disponible en:
https://www.ijert.org/research/conservation-of-wildlife-from-poaching-by-using-sound-detection-and-machine-learning-IJERTCONV8IS05007.pdf,
https://www.ijert.org/conservation-of-wildlife-from-poaching-by-using-sound-detection-and-machine-learning
[18] Sergio
Moya, Javier Kolodziej, José Szychowsky, Gonzalo Frias, «Las comunicaciones de
datos por radiofrecuencia en las selvas de Misiones ¿Son posibles?», Jornadas
de Investigación Desarrollo Tecnológico Extensión y Vinculación 2020, 2020.
[19] «An
embedded system for the detection of illegal hunting and logging - Buscar con
Google». https://www.google.com/search?q=An+embedded+system+for+the+detection+of+illegal+hunting+and+logging&oq=An+embedded+system+for+the+detection+of+illegal+hunting+and+logging&aqs=chrome..69i57.424j0j4&sourceid=chrome&ie=UTF-8
(accedido 7 de abril de 2022).
[20] M.
A. Khalid, M. I. K. Babar, M. H. Zafar, y M. F. Zuhairi, «Gunshot detection and
localization using sensor networks», en 2013 IEEE International Conference
on Smart Instrumentation, Measurement and Applications (ICSIMA), nov. 2013,
pp. 1-6. doi: 10.1109/ICSIMA.2013.6717917.
[21] «Forest
fire detection system using wireless sensor networks and machine learning |
Scientific Reports». https://www.nature.com/articles/s41598-021-03882-9
(accedido 7 de abril de 2022).
[22] L.
P. Fraile, S. Tsampas, G. Mylonas, y D. Amaxilatis, «A Comparative Study of
LoRa and IEEE 802.15.4-Based IoT Deployments Inside School Buildings», IEEE
Access, vol. 8, pp. 160957-160981, 2020, doi: 10.1109/ACCESS.2020.3020685.
[23] S.
Jayaprakasam, S. K. A. Rahim, y C. Y. Leow, «Distributed and Collaborative Beamforming
in Wireless Sensor Networks: Classifications, Trends, and Research Directions»,
IEEE Communications Surveys Tutorials, vol. 19, n.o 4, pp.
2092-2116, 2017, doi: 10.1109/COMST.2017.2720690.
[24] A.
S. Pinna, G. Portaluri, y S. Giordano, «Shooter localization in wireless
acoustic sensor networks», en 2017 IEEE Symposium on Computers and
Communications (ISCC), jul. 2017, pp. 473-476. doi:
10.1109/ISCC.2017.8024573.