Vol. 2 N° 2, julio-diciembre 2020, pag. 9-21
ISSN 2618-5520 on line
DOI - https://doi.org/10.36995/j.masingenio.2021.02.02.001
Diseño e Implementación
de un Controlador PID para un Cojinete Magnético Radial impulsado por un motor Brushless
Gabriel Y. Aguirre*a,
Luis A. Urbania, Marcelo J. Kelma, Diego A. Kelma,
Mathías E. Yasnikowskia.
aUniversidad
Nacional de Misiones, Facutad de Ingenieria, LABSE, Oberá, Misiones, Argentina
gabrielaguirre@fio.unam.edu.ar, ctt.urbani@gmail.com,
marcelomw21@gmail.com, kelmdiego@gmail.com, yasnikowski.m@gmail.com.
Este trabajo
describe la implementación de un cojinete magnético radial activo, centrándose
en el control de dicho dispositivo. El sistema consiste en un motor brushless,
que gira a una velocidad de 20000 rpm, con un eje que debe ser centrado en una
posición vertical con el cojinete magnético radial en el extremo superior. El
principio de funcionamiento permite a través de las corrientes en los pares de
bobinas, ubicadas adecuadamente, ejercer fuerzas que mantiene el eje en la
posición definida. Para llevar a cabo se plantean las ecuaciones dinámicas del
sistema y se proponen dos lazos de control, uno interno de corriente y uno
externo de posición. Los resultados experimentales obtenidos demuestran que el
sistema responde de manera satisfactoria, manteniendo el eje de manera
vertical, con un huelgo máximo dentro de los límites establecidos en el diseño.
Palabras
Clave – Cojinete
magnéticos Radial activos, Controlador PID, Electrónica de Potencia, Motor Brushless.
This work
describes the implementation of a radial active magnetic bearing, focusing on
the control of said device. The system consists of a brushless motor, which
spins at 20000 RPM, with a vertical axis that must be centered by the magnetic
bearing placed in the upper side. The working principle allows, by means of
electrical currents circulating through adequate placed pair of coils, to exert
forces that keep the axis in a certain position. To achieve this, the plant
dynamic equations are derived and two control loops are proposed: an inner
current one and an external position one. The experimental results show that
the system behaves in a satisfactory way, keeping the axis in a vertical
position, with a maximum gap within the limits specified in the design phase.
Keywords – Brushless Motor, PID Control, Power
Electronic, Radial Active Magnetic Bearing.
Símbolos
g Huelgo del cojinete (Gap)
x(t) Posición x del eje del cojinete
uBx Tensión de control en el par de bobinas x
Ib, ib, ix Corriente de bias, Corriente de control, y corriente de control en la
dirección x
ki Constante de fuerza-corriente
ks Constante de fuerza-desplazamiento
L0 Inductancia del bobinado en
la posición central del eje
N Número de vueltas de las 2 bobinas en serie,
µ0 Permeabilidad del aire
S Área de un polo del estator
m Masa del rotor
rL Resistencia bobinado en serie
fext Disturbio o perturbación del giro del rotor
ex(t) Error de posición x
kp,
kd, kint Constante
proporcional, derivativa e integral del controlador de posición
1. Introducción
Los cojinetes magnéticos se
han comenzado a emplear en diversas aplicaciones donde es necesario utilizar
motores de altas velocidades, debido a que los sistemas con rodamientos generan
fricciones que limitan la velocidad final. Dichas fricciones van acompañadas de
desgastes mecánicos y elevadas temperaturas [1].
Los cojinetes magnéticos son
rodamientos que sostienen a la carga utilizando fuerzas magnéticas. Existen
diferentes tipos de rodamientos magnéticos [2], entre ellos se pueden discriminar
dos grupos bien definidos, los cojinetes pasivos y los activos; los primeros
utilizan imanes permanentes para generar las fuerzas, pero son difíciles de
diseñar; mientras que los segundos funcionan utilizando electroimanes, es
decir, bobinas excitadas por una corriente eléctrica que genera las fuerzas
para equilibrar la carga en una determinada posición. Por otro lado, existen
cojinetes híbridos que emplean imanes permanentes para generar una situación de
equilibrio estático y a través de los electroimanes se generan las fuerzas
necesarias para mantener el equilibrio dinámico.
Dentro de los cojinetes
activos se pueden emplear diferentes topologías para realizar el control, entre
ellas la topología homopolar, que consiste en un arreglo de 4 electroimanes,
donde cada uno permite el movimiento en un sentido de los ejes XY. Mientras que
la otra topología empleada es el heteropolar, el cual está compuesto de 8
bobinas, donde se conectan de a pares para realizar el control de los
diferentes sentidos de los ejes XY [3]. Un tercer grupo son los tripolares,
los cuales son poco frecuentes en la literatura [4].
Los sistemas rotacionales que
emplean este tipo de rodamientos pueden poseer varios grados de libertad, es
decir, pueden levitar totalmente utilizando dos cojinetes radiales y un axial o
únicamente emplear un cojinete radial apoyado sobre un rodamiento mecánico
especial para alta velocidades.
El objetivo de este trabajo
es plantear, diseñar e implementar un control en lazo cerrado para un cojinete
radial activo para un motor del tipo brushless que opera a 20000 RPM.
En la sección II se presentan
el desarrollo teórico del cojinete magnético radial, junto con el diseño de los
controladores a implementar. En la sección III se presentan el prototipo, los
controladores y los resultados de la implementación; finalmente se describen
las conclusiones y trabajos a futuro.
2. Desarrollo
2.1.
Modelo del cojinete radial
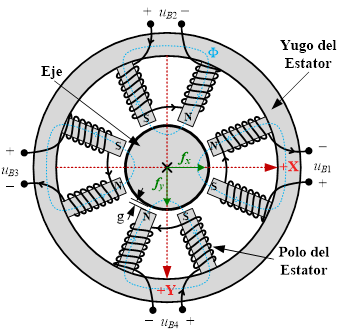
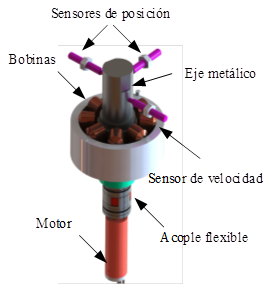
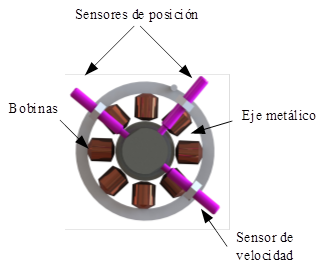
El rodamiento magnético
diseñado y construido consiste en un cojinete heteropolar, constituido por un
conjunto de bobinas como se muestra en la Fig. 1. En el centro se encuentra un eje
metálico, y alrededor un estator conformado por el yugo y los 8 polos, en cada
polo se montan bobinas de un número determinado de espiras. Existe una
distancia entre los polos y el eje denominado gap (g). Dicha distancia
será el limite donde se podrá mover el eje, en general esta distancia no supera
el orden de los milímetros (g < 2mm). Como se observa en la misma
figura, las bobinas son interconectadas de a pares con la configuración
NNSSNNSS (N: Norte – S: Sur). Existen 4 pares de bobinas por las cuales circula
una determinada corriente, dicha corriente generan campos magnéticos que
producen fuerzas de atracción hacia los diferentes cuadrantes. El par de bobina
identificado como uB1 genera una fuerza hacia el
denominado eje +X, en cambio uB3 genera una fuerza
hacia –X; de la misma manera uB4 y uB2
generan fuerzas sobre el eje Y.
Fig. 1. Esquema fundamental del
cojinete magnético.
El funcionamiento de los
cojinetes magnéticos activos parte de establecer una corriente media en todas
las bobinas [5], denominada corriente de bias Ib,
que genera un equilibrio estático de fuerzas sobre el eje metálico. Para
realizar el control de la posición del eje se utiliza una corriente ib
de manera que la corriente total sobre la bobina está definida como Ib+ib.
Para realizar un desplazamiento en uno de los ejes, se incrementa el valor de
la corriente en +ib en un par de bobina y se disminuye en
este mismo valor ‒ib al par opuesto. De la misma manera
se generaría un desplazamiento en el eje ortogonal. Al definir la corriente de
bias se establecen el máximo y el mínimo posibles para el control de las
corrientes, de manera que el mínimo será Ib – Ib
= 0A, mientras que el máximo será Ib + Ib =
2 Ib. Cabe aclarar que el objetivo de los cojinetes es
mantener la pieza metálica en el centro geométrico del cojinete.
Los sistemas de éste tipo son
inestables y no lineales debido a las dinámicas involucradas. Por lo tanto, es
necesario realizar un control de las posiciones a través de un lazo cerrado, de
ésta manera a través de un sensor de posición se mide la ubicación del rotor en
un eje y a partir de dicha información se ajusta la corriente para corregir la
ubicación de dicho eje mediante los electroimanes.
Para obtener un modelo lineal
se realizan diferentes consideraciones, donde la principal consiste en permitir
desplazamientos pequeños en torno del punto de equilibrio o centro geométrico;
aun así, la fuerza generada por el sistema es no lineal y dependiente del
cuadrado de la corriente que circula por la bobina e inversamente proporcional
al cuadrado del desplazamiento [1][5].
Para definir el modelo de los
rodamientos magnéticos se establecen las ecuaciones matemáticas que describen
el sistema eléctrico y el sistema mecánico. Basado en [6] y tomando la consideración del
párrafo anterior, se obtiene la siguiente expresión linealizada en torno a
centro geométrico del cojinete, que también es válida para el eje transversal.
|

|
(1)
|
donde ix es la
corriente de control de las bobinas en la dirección x; mientras que ki
es la constante de fuerza-corriente y ks es la constante de
fuerza-desplazamiento, definidas como:
|
|
(2)
|
|
|
(3)
|
donde Ib es la
corriente de bias de las bobinas, g es el gap, dado por la diferencia
entre el radio del rotor y el radio interno entre el centro geométrico y el
polo del yugo de la bobina. L0 la inductancia del bobinado en
la posición central del eje establecido como
|
|
(4)
|
Dicha expresión depende del número de
espiras N de las 2 bobinas en serie, de la permeabilidad del aire µ0
y del área S de un polo del estator.
A partir de la Fig. 1,
aplicando los conceptos de la ley de Newton se establece la siguiente ecuación [7] de movimiento en uno de los ejes:
donde m es la masa del rotor.
Además se toma la dinámica
del sistema eléctrico como se describe en [8] definido como
donde rL y L0
son la resistencia e inductancia del bobinado, mientras que ux(t)
es la tensión de control del sistema. El factor ki es la
constante de fuerza corriente que genera una fem en el inductor debido al
desplazamiento del eje, dicho factor se considera despreciable respecto a los
otros términos [7].
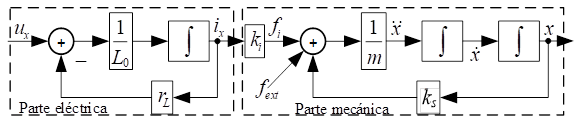
El sistema para un eje queda
representado por el diagrama en bloques de la Fig. 2.
Fig. 2. Diagrama de bloques del
sistema dinámico de un cojinete magnético radial para un solo eje.
Donde fext
es un disturbio, que en este caso está representando la fuerza de desbalance
que posee el eje al girar. Dicha fuerza es proporcional al cuadrado de la
velocidad de giro por la masa de desbalance y la distancia de dicha masa del
baricentro del eje.
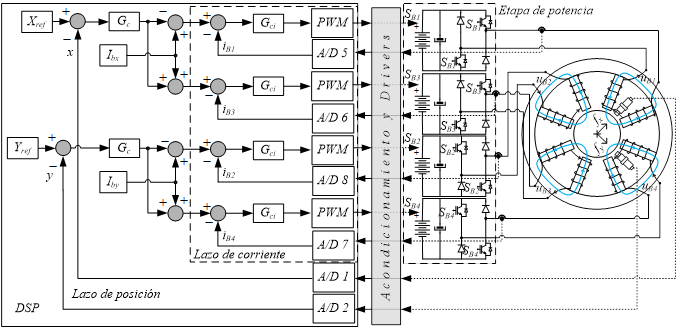
2.2.
Esquema de control
propuesto
Para realizar el control se
proponen dos controladores, un control de corriente interno, definido para
controlar la dinámica dado por la expresión (6); y un control de posición externo
para controlar la dinámica presentada en la ecuación (5). El esquema general se presenta en
la Fig. 3, donde se esquematiza además la
ubicación de los sensores, tanto de corriente como de posición, las etapas de
potencia junto a los drivers y las entradas analógicas digitales (ADC) y
salidas de modulación por ancho de pulso (PWM) del procesador digital de
señales (DSP).
Para realizar el control de
corriente, y en consecuencia el control de la posición, se emplea una etapa de
potencia dado por un convertidor de corriente continua-corriente continua
(CC-CC) que se presenta en el esquema de la Fig. 3. Dicho convertidor tiene la
capacidad de generar una circulación de corriente en un solo sentido, con lo
cual se genera la corriente de bias Ib y luego se establecen
montada sobre la misma las corrientes necesarias para el control del cojinete [9][10]. En este caso son necesarios cuatro
convertidores de este tipo, que proporcionan las corrientes para manejar los
cuatro cuadrantes de movimiento del rodamiento magnético radial.
Fig. 3. Esquema de control con lazo
interno de corriente y lazo externo de posición.
2.2.1.
Lazo interno de corriente
El lazo de corriente que se
propone es del tipo proporcional integral (PI), teniendo en cuenta en el diseño
que la respuesta de corriente sea más rápida que la respuesta de posición, de
manera que puede ser despreciada y así definir que el control de posición es
una relación entre una corriente y la posición del cojinete. Realizando dicha
suposición se puede considerar que la corriente de referencia del lazo de
corriente es igual a la corriente sobre el par de bobinas.
2.2.2.
Lazo externo de posición
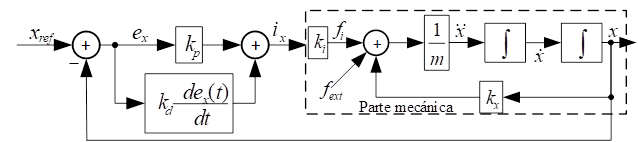
El lazo de control de
posición se determina utilizando la dinámica de la ecuación (5), y el controlador propuesto es del tipo
proporcional derivativo (PD), el cual se emplea para estabilizar el sistema,
como primera medida. Además, se considera despreciable la dinámica del lazo de
corriente, ya que responde con una velocidad mucho mayor que la posición. Por
lo tanto, podemos el sistema en lazo cerrado de posición está definido como se
muestra en el siguiente esquema:
Fig. 4. Esquema de control de
posición.
Teniendo en cuenta que la
referencia de posición es nula, se puede establecer que ex(t)
= –x(t) y la corriente de control es
|
|
(7)
|
Con la expresión 7 y 5 se llega a que
|

|
(8)
|
Resultando similar a un sistema masa-resorte, donde la
ganancia kikd es la constante de fricción viscosa
(amortiguamiento) y (kikp – ks)
es la constante del resorte (rigidez). Para que el sistema sea estable tanto la
constante de rigidez como la de amortiguamiento deben ser positivos.
Empleando la dinámica
observada en la ec (8) y lo establecido en [7] se definen algunos criterios para
seleccionar los valores de las ganancias del compensador de manera que
donde k es una constante que
define la rigidez del movimiento y d establece el amortiguamiento.
La constante k debe
estar comprendido entre 1 a 3 veces el valor de ks para
proporcionar una rigidez intermedia, dicho valor depende de la aplicación que
se quiere emplear y de los disturbios externos que se puedan presentar a la
hora de implementar el sistema. Por otro lado establece que el coeficiente d
debe estar definido entre
El sistema de control
planteado permite estabilizar el sistema pero no permite obtener error de
posición nulo, con lo cual se incluye un controlador integral, de manera que la
ganancia vinculada a ésta acción sea aproximada al valor de la ganancia proporcional.
Por lo tanto el controlador empleado es
|
|
(11)
|
donde kp es la
ganancia proporcional, kd la ganancia derivativa e kint
la integral.
El controlador planteado es de tiempo continuo, el
cual debe ser discretizado para ser empleado en un DSP.
3. Resultados
Para la implementación del
rodamiento magnético se construye el prototipo que se presenta en la Fig. 5, mientras que en la Tabla 1 se presentan algunas de las
características constructivas, debido a tratados de confidencialidad no se
detallan en su totalidad dichos prametros.
|
|
|
|
a) Modelo vista lateral
|
b) Modelo vista superior
|
Fig. 5. Modelo diseñado y construido
de los rodamientos magnéticos.
Tabla 1:
Datos del prototipo empleado.
|
Característica
|
Datos
|
|
Masa del rotor m
|
0,660 kg
|
|
Longitud del rotor
|
0,104 m
|
|
Radio rotor r
|
0,0225 m
|
|
Velocidad nominal ωr
|
20000 rpm
|
|
Corriente de bias Ib
|
1 A
|
|
Resistencia serie del bobinado rL
|
1,375 Ω
|
|
Tensión Entrada Vcc
|
36 V
|
|
Frecuencia de muestreo fm
|
20 kHz
|
Uno de los puntos más
importantes para la implementación de este tipo de sistemas es la frecuencia de
muestreo, dicho valor está dado por la máxima dinámica que se tiene en el
sistema. En este caso la dinámica está vinculada con el disturbio, y dicha
perturbación está enlazado con la velocidad de giro, con lo cual si se quiere
llevar al motor a una velocidad de 333,3 Hz, es necesario adquirir dicha señal
con una buena representación. Un criterio es seleccionar una frecuencia de
muestreo de al menos 10 veces la frecuencia máxima. Para este caso se opta por
adquirir las señales a una frecuencia de 20 kHz.
Por otro lado, el ancho de
banda de los sensores utilizados en ésta aplicación deben permitir realizar el
seguimiento de las dinámicas sin incorporar atenuaciones o ruidos indeseables.
Por éste motivo se utilizaron sensores de corriente del tipo LEM LA 25-NP que
posee un ancho de banda de 150 kHz. Mientras que los sensores de posición son
los 3300 XL NSv de Bentley Nevada, los cuales poseen un ancho de banda de
10kHz. La señal proporcionada por el sensor de posición poseen offset de 2,8V;
además el máximo movimiento de +0,4mm corresponde a 4,5V; mientras que el mínimo
de –0,4mm equivale a 0,5V. Obteniendo una ganancia de 0,8mm/4V menos el offset.
Los actuadores de la etapa de
potencia disponibles para implementación inmediata son llaves del IGBT,
disparadas por sus correspondientes drivers, los cuales son manejados por una
etapa amplificadora, que sirve de interfaz con el DSP. De la misma manera, los
sensores son acondicionados para ser adquiridas las señales por el conversor
analógico digital (ADC).
3.1.
Desempeño del control
interno de corriente
El controlador de corriente
utilizado es un PI, donde la función de transferencia en tiempo continuo
empleada se muestra a continuación
|
|
(12)
|
Utilizando la aproximación de
la diferenciación dada por el operador de Laplace S, empleando el método de la
derivada hacia atrás en tiempo discreto de Backward Euler, con el
periodo de muestreo (T = 1/fm) de la Tabla 1 se llega a
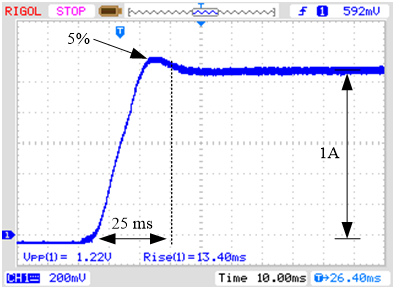
Mediante la implementación en
el DSP se observa en la Fig. 6 que la respuesta a un escalón de
corriente unitario posee un tiempo de establecimiento es de 20 ms y un
sobrepaso de 5%.
Fig. 6. Respuesta experimental del
lazo interno de corriente para una referencia en escalón de 1A. Esc: 1 A/V.
3.2.
Desempeño del control
externo de posición
Como se describió en la
sección 2.2.2 los lazos de posición son controlados por una acción PID. De
acuerdo con (9) y (10) se establece que la constante de
rigidez k será de 2,6 veces ks y que la constante de
amortiguamiento d será de 0,64 veces el valor de  .
Mientras que el valor de la constante integral se define aproximadamente igual
a kp. Por lo tanto, el controlador PID en tiempo continuo
será
.
Mientras que el valor de la constante integral se define aproximadamente igual
a kp. Por lo tanto, el controlador PID en tiempo continuo
será
|

|
(14)
|
De la misma manera que en (13), mediante la discretización de Backward
se obtiene:
|

|
(15)
|
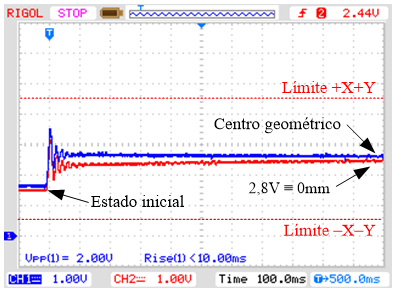
Para verificar el correcto
funcionamiento del lazo externo de posición se implementa el controlador
diseñado en el DSP; las respuestas a un escalón desde la posición actual al
centro geométrico del cojinete (0mm; 0mm) se presentan en la Fig. 7. En dicha figura se observa la
dinámica transitoria de ambos ejes, de manera que se inicia en –0,24mm (1,6V), se
produce un sobrepaso y llegan a régimen permanente en 100ms. El valor final
constante de 2,8V equivale al centro geométrico del rotor y se corresponde con
la posición 0mm en x y 0mm en y.
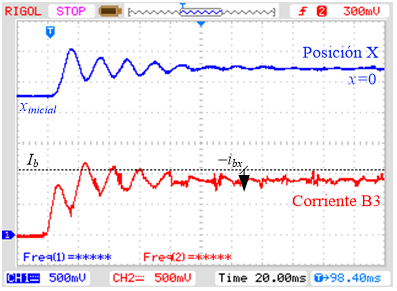
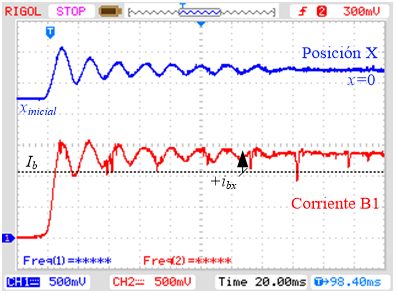
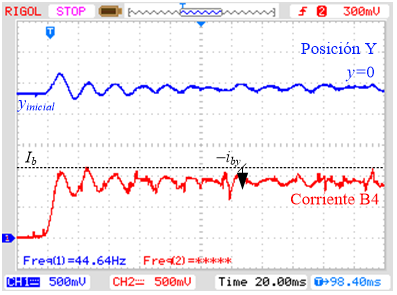
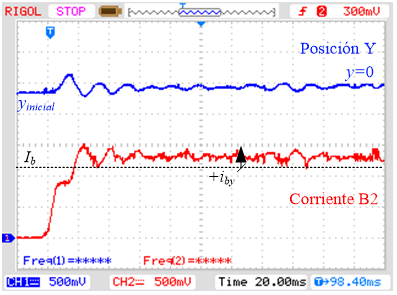
Por otro lado se realizan
algunos ensayos para observar la dinámica de corriente y la de posición en cada
par de bobinas cuando se colocan las referencias de posición a cero. Estas
respuestas transitorias se presentan en las Fig. 8 a, b y Fig. 9 a y b.
Fig. 7. Respuesta experimental del
lazo de posición de ambos ejes para una referencia en escalón de 0 mm. Esc:
0,8mm/4V. Offset 2,8V.
|
|
|
|
a) Posición X – Corriente en B3.
|
b) Posición X – Corriente en B1.
|
|
Fig. 8. Dinámica experimental del sistema en
el eje X junto a la acción de las corrientes. Esc X: 0,5mm/4V; Esc. I: 1A/V.
|
Al evaluar la dinámica de las
corrientes se observa que existe una corriente de bias de 1A y sobre ésta se
suma o se resta la acción de control del lazo externo de posición. En el caso
de los pares de bobinas B3 y B4 (Fig. 8 a y Fig. 9 a) se observa que la corriente está
por debajo de Ib, mientras que los casos B1 y B2 están por
encima (Fig. 8 b y Fig. 9 b). De manera que el par de bobinas
con menor corriente ejerce una fuerza menor que su contraposición con lo cual
mantiene la masa en un punto tal que centra el rotor.
|
|
|
|
a) Posición Y – Corriente en B4.
|
b) Posición Y – Corriente en B2.
|
Fig. 9. Dinámica experimental en el
eje Y junto a la acción de las corrientes. Esc Y: 0,5mm/4V; Esc. I: 1A/V.
3.3.
Órbitas XY
De la manera que se presentó
en el apartado anterior se confirma el correcto funcionamiento del cojinete
magnético en una posición estática del eje del motor. A continuación se
realizaron diferentes pruebas de giro del rotor y se obtuvieron los desempeños
ante este tipo de perturbación. Para ello se empleó un motor brushless
Maxon EC 25 de velocidad nominal de 62000 rpm/250W, con su correspondiente
servocontroladora ESCON 70/10.
Los ensayos realizados
consistieron en tomar con el osciloscopio las órbitas generadas por el cojinete
ante las perturbaciones generadas por el giro; dichas perturbaciones son el
resultado de las excentricidades y los desbalances que posee el eje en rotación.
Las curvas de aceleración son constantes hasta alcanzar la velocidad del
ensayo.
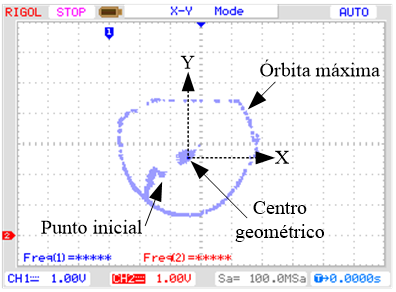
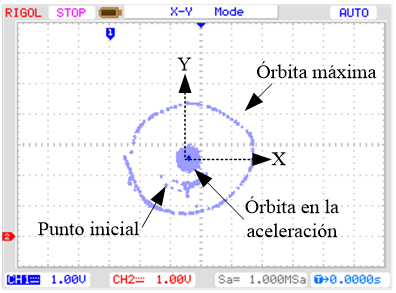
La Fig. 10 muestra la órbita máxima admitida
por el cojinete, el punto inicial y la posición final cuando el motor no está
girando. Se observa que el eje permanece en el centro con pequeños movimientos
de un máximo de 0,0625 mm.
Fig. 10. Órbita a 0 rpm para una
referencia en escalón de 0 mm. Esc: 0,8mm/4V.
Luego, cuando existen
diferentes velocidades, dichas órbitas alrededor del punto central se van
incrementando debido a las fuerzas que ejercen las masas desbalanceadas del
eje. Cabe recordar que las fuerzas de desbalance sobre el eje son
proporcionales al cuadrado de la velocidad de giro. En las siguientes figuras
se presentan, por un lado, las órbitas del cojinete desde el arranque hasta una
determinada velocidad de prueba, y por otro, la máxima órbita en la velocidad
de prueba.
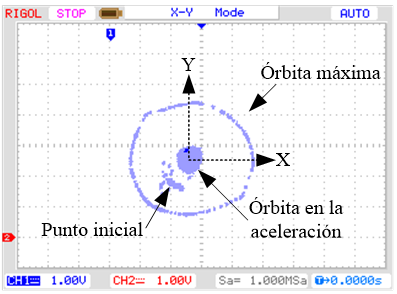
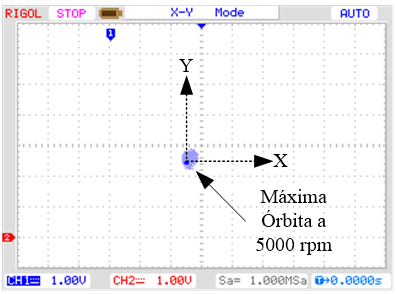
En la Fig. 11 a y b se observa que la órbita
máxima se da en el transitorio y llega a 0,1 mm, Mientras que en régimen a 5000
rpm la órbita se mantiene en 0,06 mm.
|
|
|
|
a)
Transitorio de aceleración.
|
b)
Velocidad permanente a 5000 rpm
|
Fig. 11. Órbita a 5000 rpm para una
referencia en escalón de 0 mm. Esc: 0,5mm/4V.
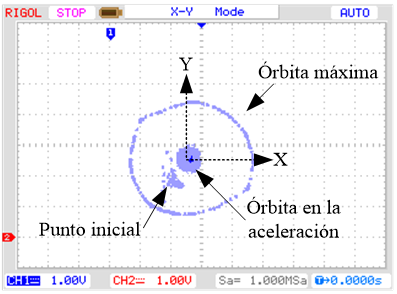
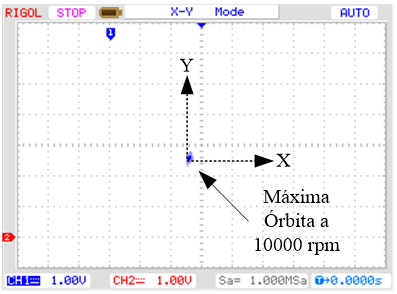
En la Fig. 12 y Fig. 13 la órbita en los transitorios se
mantiene en aproximadamente 0,1 mm y en las velocidades del ensayo se mantienen
0,04 mm aproximadamente.
|
|
|
|
a)
Transitorio de aceleración.
|
b)
Velocidad permanente a 10000 rpm
|
Fig. 12. Órbita a 10000 rpm para una
referencia en escalón de 0 mm. Esc: 0,5mm/4V.
|
|
|
|
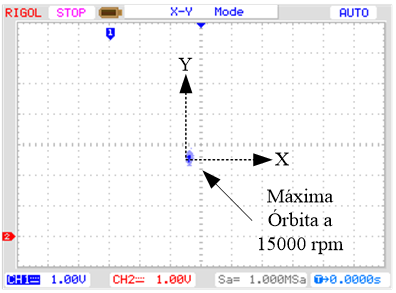
a)
Transitorio de aceleración.
|
b)
Velocidad permanente a 15000 rpm
|
Fig. 13. Órbita a 15000 rpm para una
referencia en escalón de 0 mm. Esc: 0,5mm/4V.
3.4.
Revoluciones XYt
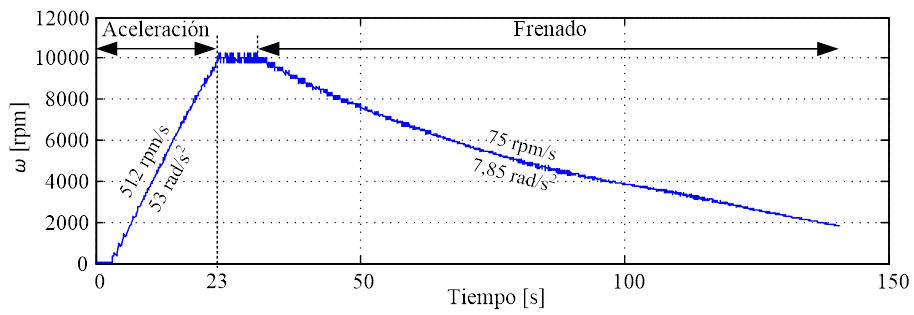
Finalmente se realiza un
ensayo donde se releva las posiciones XY y tiempo, donde se realiza un ensayo
de aceleración constante hasta la velocidad de 10000 rpm aproximadamente y
luego se libera el motor para que se frene naturalmente. Dicho perfil de velocidad
se presenta en la Fig. 14.
Fig. 14. Perfil de velocidad empleado
para el ensayo de revoluciones.
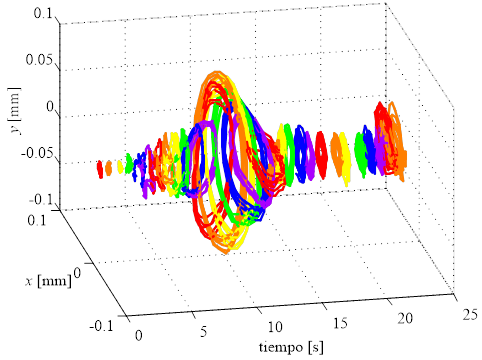
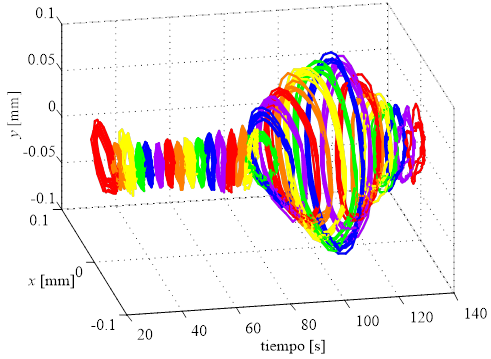
En la Fig. 15 a se presentan las órbitas en
función del tiempo para cuando la maquina se acelera y en la Fig. 15 b para cuando se frena.
|
|
|
|
a) Órbitas cuando se acelera el motor.
|
b) Órbitas al frenar el motor.
|
Fig. 15. Curvas XYt para una rampa de aceleración y frenado constante.
En ambas curvas se observa
que existen órbitas mayores, al buscar el punto se observa que en ambos casos
se corresponde con la velocidad 3571 rpm = 59,51Hz. Dicho punto es una
frecuencia de resonancia del eje. A pesar de dicha resonancia las órbitas no superar
el valor de 0,1 mm.
4. Conclusiones
El trabajo describe una
estrategia de control para un cojinete magnético radial activo; inicialmente se
presentó el modelo del cojinete magnético radial activo empleado en ésta
situación, luego a partir de dicho modelo se propuso los parámetros para el
control. Las técnicas de control empleadas fueron un control interno PI de
corriente y un control externo de posición del tipo PID. Los diseños realizados
en tiempo continuo fueron discretizados e implementados en un DSP. Con diferentes
resultados se pudo verificar el diseño y se comprobó el correcto funcionamiento
para el rango de velocidades establecidas.
Como trabajos futuros se
desea incluir un controlador feedforward, de manera que se oponga a las
perturbaciones que genera el desbalance de masa del eje rígido empleado en el
cojinete. Además se prevé implementar técnicas de control no lineal a fin de
comprobar el rechazo a perturbaciones.
Agradecimientos
Este
trabajo ha sido presentado de manera preliminar en la 8va Jornada de
Investigación, Desarrollo Tecnológico, Extensión, Vinculación y Muestra
(JIDeTEV 2018) [11]
llevado a cabo en el mes de agosto del 2018 en la Facultad de Ingeniería de la
Universidad Nacional de Misiones.
Referencias
|
[1]
|
M. Puskaric, Z. Car, y N. Bulic, “Magnetic Bearing Control System
based on PI and PID Controllers,” Teh. Vjesn. - Tech. Gaz., vol. 25, no. 1, pp. 136-140, feb. 2018,
10.17559/TV-20160726112308.
|
|
[2]
|
T. Nussbaumer, P. Karutz, F. Zurcher, y J. W. Kolar, “Magnetically
Levitated Slice Motors - An Overview,” IEEE Trans. Ind. Appl., vol. 47, no. 2, pp. 754-766, March/April 2011,
10.1109/TIA.2010.2102731 .
|
|
[3]
|
Weiyu Zhang, Huangqiu Zhu, “Radial magnetic bearings: An overview,” Results
in Physics, vol. 7, pp. 3756-3766, August 2017, 10.1016/j.rinp.2017.08.043.
|
|
[4]
|
Meeker, D.C.; Maslen, E.H. “Analysis and control of a three pole
radial magnetic bearing,” In Proceedings of the Tenth International
Symposium on Magnetic Bearings, Martigny, Switzerland, August 2006.
|
|
[5]
|
J. Denk, D. Stoiber, H. Kopken and H. Walter, "Industrialization
of AMB Systems With Standard Drive Technology," IEEE Transactions on
Industry Applications, vol. 49, no. 2, pp. 791-798, March-April 2013,
10.1109/TIA.2013.2242426
|
|
[6]
|
A. Chiba, T. Fukao, O. Ichikawa, M. Oshima, M. Takemoto, y D. G.
Dorrell, “Magnetic Bearings and Bearingless Drives”. Elsevier Science, 2005.
|
|
[7]
|
G. Schweitzer y E. H. Maslen, “Magnetic bearings : theory,
design, and application to rotating machinery”. Springer, 2009.
|
|
[8]
|
R. RARICK, “Control Of An Active Magnetic Bearing With And Without
Position Sensing,” M.S. thesis, Department of Electrical and Computer
Engineering, Cleveland State University, Ohio, USA, 2007.
|
|
[9]
|
T. E. Seiphetlho, “Power electronic activation for active magnetic
bearings,” M.S. thesis, Department of Electrical, Electronic and Computer
Engineering, North-West University, Potchefstroom Campus, South Africa, 2006.
|
|
[10]
|
Zhu Changsheng and Mao Zhiwei, “A PWM Based Switching Power Amplifier
for Active Magnetic Bearings,” in International Conference on Electrical
Machines and Systems, Nanjing, China, 2005, pp. 1563-1568,
10.1109/ICEMS.2005.202812
|
|
[11]
|
G. Y. Aguirre, L. A. Urbani, M. J. Kelm, D. A. Kelm, M. E.
Yasnikowski, “Cojinete Magnéticos empleados en motores de alta velocidad,”
8va Jornadas de Investigación, Desarrollo Tecnológico, Extensión y
Vinculación, FI, UNaM, Oberá, Misiones, Agosto 2018, ISSN 2591-4219 http://conferencias.fio.unam.edu.ar/index.php/JIDeTEV/Octava-JIDeTEV/schedConf/presentations
|